Key ideas
- •Researchers developed a soft robotic wing that senses water flow and adjusts its shape automatically.
- •The design reduced sudden underwater jolts by 87 percent compared with rigid wings.
- •Embedding sensing into the structure could make underwater robots more stable and energy efficient.
For decades, underwater robots have tried to overpower the ocean. They have used hard shells, fixed wings, and strong motors to move through rough water. When currents change or waves get bigger, their control systems use more energy to stay steady.
Now, engineers are trying a new approach. Instead of making stronger machines that fight against water, they are making softer machines that can sense it.
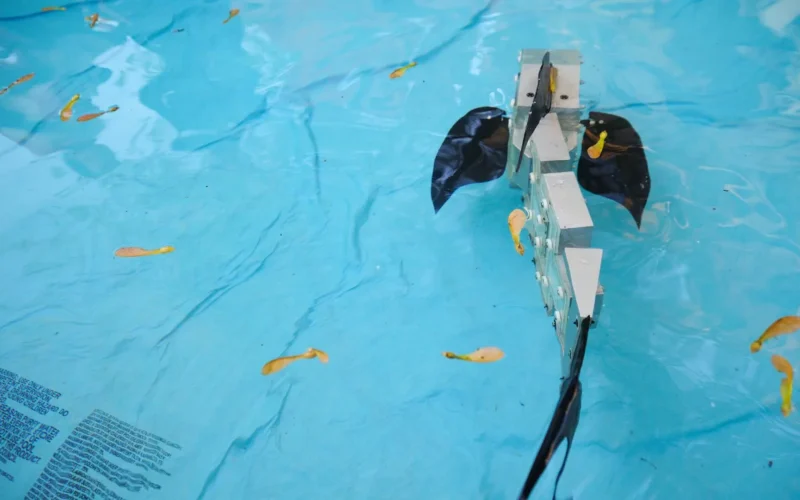
Researchers at the University of Southampton, along with teams in Edinburgh and Delft, have developed a robotic wing that can sense changes in water and automatically adjust its shape.
The wing, inspired by birds and fish, combines sensing and movement in its design. In lab tests, it cut sudden upward jolts from underwater currents by 87 percent compared to regular hard wings used on underwater robots called AUVs.
The shift represents a deeper transformation in how robots interact with complex environments.
From fighting turbulence to sensing it
Autonomous underwater vehicles are widely used for tasks ranging from seabed mapping to offshore infrastructure inspection. They operate in unpredictable conditions. Currents shift without warning. Turbulence builds around obstacles. Pressure waves travel through confined spaces.
Traditional AUVs handle these changes using a main control system. Sensors notice movement changes. Software figures out how to fix them. Motors adjust their power. This method works, but it uses a lot of energy and only reacts after the problem has already happened. Biological systems operate differently.
Fish sense water movement through their lateral line system. Birds feel changes in airflow through feathers and wing structures. These signals are not routed through a distant control center before every micro-adjustment. The body itself contributes to sensing and response.
Engineers call this proprioception, which means an inner sense of position, movement, and force. It helps animals adjust smoothly to their surroundings. The new robotic wing applies that principle to underwater robotics.
The main part of the design is an electronic skin, or e-skin, made of bendable liquid-metal wires embedded in silicone. When the wing bends in the water, the wires change shape. This change affects electrical signals, which act like nerve signals. The wing can sense how it is being pushed or twisted.
Inside the wing are tubes filled with pressurized liquid. When the sensing layer detects a change, the system adjusts the wing’s stiffness or curvature. This reaction happens right away and in the same spot.
In tests, the wing responded up to four times faster than other soft wings that use heat to change shape. It also used about one-fifth the energy of those heat-based systems.
This mix of speed and saving energy is important. Underwater robots often have limited power. Every bit of energy saved on staying stable means the robot can work longer or carry more equipment.
The results show that integrating sensing and movement directly into the robot’s body may work better than relying solely on a main control system.
Embodied intelligence in practice
The idea behind the wing is part of a bigger trend in robotics called embodied intelligence. Instead of relying only on computer programs and chips to make changes, engineers design the robot’s body to help with control.
A rigid underwater wing resists deformation. When struck by a current, it transfers forces to the vehicle’s structure. A soft, adaptive wing can absorb and redistribute those forces.
In lab tests, researchers compared the new wing with both a hard wing and a simpler soft wing without built-in sensing. The sensing wing kept itself steadier than either one. It cut sudden upward jolts from underwater currents by almost 90 percent.
For AUVs operating near fragile structures or performing delicate tasks, staying steady is important. Sudden jolts can make sensors less accurate, disrupt mapping, or accelerate wear on parts.
Reducing impulse loads at the wing level reduces the burden on the rest of the vehicle. Energy remains one of the main constraints in underwater robotics. AUVs cannot easily recharge during a mission.
Long trips need careful planning of power use. Thermal actuation systems used in some morphing structures require significant heating and cooling cycles.
In the new wing, the hydraulic system changes stiffness using moving parts. The e-skin senses bending by changes in the electrical resistance of the liquid metal wires. This setup seems to use less energy overall.
A fivefold reduction in energy consumption compared to thermal morphing systems may not sound dramatic at first glance. Over long missions, it is.
Energy savings translate into longer endurance or additional operational capacity.
Bridging soft and rigid systems
Soft robotics has long promised more flexible machines, but adding soft parts to mostly hard vehicles has been difficult. Soft materials can break easily. They have to handle being bent many times, changes in pressure, and possible hits.
The research team acknowledges that scaling the technology presents challenges. The wing must integrate with rigid hull structures. Hydraulic systems must remain reliable under extended use. Materials must survive prolonged exposure to saltwater and biofouling.
But the overall direction is clear. Mixed systems that use both hard frames and flexible, sensing soft parts may be the way forward.
Instead of making entire vehicles from soft materials, engineers can add sensing components to key surfaces that handle air or water flow. That incremental approach may make industrial adoption more realistic.
While the immediate application is for AUVs, the underlying principle extends further.
Airplanes face rough air just like underwater vehicles face changing currents. Land vehicles deal with changing grip and weight. Even robot arms could use built-in sensing in their parts.
Placing sensors inside materials speeds up the response to changes. It shortens the time needed to adjust. Small fixes can happen before bigger changes are needed.
The Southampton-led team notes that their wing’s stabilization performance approached levels observed in biological systems, although direct comparisons must be made cautiously.
Even so, narrowing the gap between engineered systems and animal performance marks progress.
A shift in design philosophy
For most of robotics history, engineers wanted robots to be stiff and strong. Hard materials were easier to design and predict. Control systems were implemented to address problems after they occurred.
Soft robotics questions the old way of thinking. It shows that being flexible and using smart materials can reduce the need for large corrections.
“Instead of building tougher robots designed to fight the ocean’s power, we are moving toward smarter, softer machines that work in synergy with the environment,” one of the researchers said.
This way of thinking is part of a bigger change. As robots are used in wild, natural places, using lots of force does not work as well. Sensing and adjusting with the materials themselves may make robots tougher.
So far, the results are from lab tests. The ocean is much tougher.
Using these robots in the real world will require ensuring they last through long missions. The hydraulic systems must handle pressure changes and potential leaks. The electronic skin parts must resist rust and wear out.
Turning wing prototypes into full robots will also need careful design. The control systems must align with changes in the robot’s structure and with how it moves and plans its tasks.
Robots are beginning to feel the water, not just measure it. That shift, from centralized correction to embodied adaptation, could reshape how machines operate in complex environments.
The ocean is dynamic and unpredictable. For robots to operate there reliably, they may need to sense as animals do through their bodies.
If that approach proves vital, the future of underwater robotics may be less about overpowering turbulence and more about moving with it.